-
Patrick Simmel authoredPatrick Simmel authored

Die Challenges und der Code
Es wurden verschiedene Challenges gestellt, die der Bot mit unseren Skripten lösen sollte.
Die verschiedenen Challenges sind in diesem Repository zu finden.
Das eigene Repository enthält die Skripte zu den einzelnen Challenges.
Diese sind aber bei jeder einzelnen Challenge nochmal mitverlinkt. Die einzelne Challenge, die ausgelassen wurde, ist
die dritte Challenge, bei der es hieß, es sei nicht zwingend notwendig.
Challenge 0:
Aufgabenstellung
Wie weit ist die minimale Distanz zur Wand, ohne diese zu berühren?
Lösung
Mithilfe der Laser-Sensor-Daten des Wafflebot-Roboters konnte man die Distanz 360 Grad um den Roboter herum messen und
ausgeben lassen. Der hierfür notwendige Parameter war msg.ranges[]. Die vier voreingestellten Distanzen waren folgende:
-
msg.ranges[0]: Die Distanz vor dem Roboter -
msg.ranges[90]: Die Distanz links vom Roboter -
msg.ranges[-90]: Die Distanz rechts vom Roboter -
msg.ranges[180]: Die Distanz hinter dem Roboter
Die Angaben der Distanz waren zwischen inf. und 0:
-
inf.: Das nächste Objekt weiter entfernt, als der Sensor messen kann -
0: Das nächste Objekt würde quasi im Sensor stehen. 0 ist eigentlich nicht zu erreichen, da um den Sensor herum noch ein Bereich dazuzurechnen ist, da der Wafflebot breiter ist, als nur der Sensor.
Challenge 1:
Aufgabenstellung
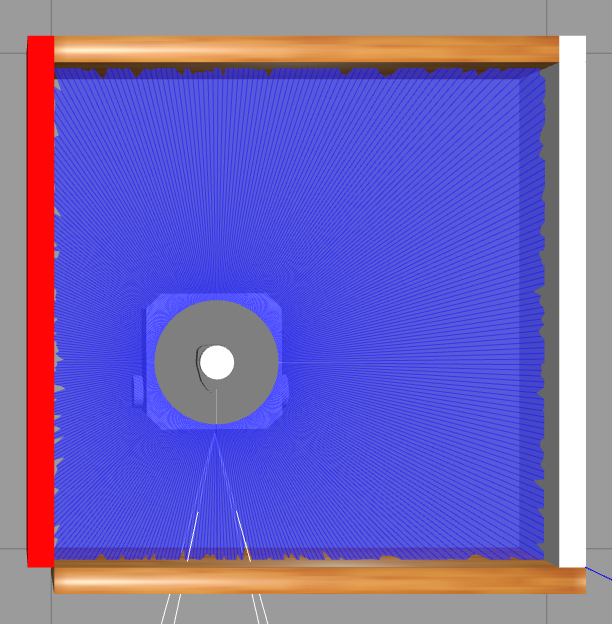
Fahr so nah wie möglich zur roten Wand und bleib davor stehen, ohne damit in Berührung zu kommen
Lösung
Die Herangehensweise hierfür war schlicht und ergreifend, in die Methode scan_callback eine if-else-Schleife einzubauen.
In dieser Schleife wurde lediglich festgelegt, dass der Roboter so lange beschleunigen, also geradeaus fahren sollte,
bis msg.ranges[0] kleiner oder gleich 0.2 war. Ist dieser Wert erreicht, so wird die Beschleunigung wieder auf den
Wert 0 gesetzt; d.h. der Bot bleibt stehen. 0.2 war die perfekte Distanz, um ganz knapp vor der roten Wand stehen zu
bleiben und nicht anzufahren.
Der relevante Code (hier zu finden) aus der scan_callback-Methode:
def __init__(self):
self.safe_distance = 0.2
def scan_callback(self, msg):
if msg.ranges[0] > self.safe_distance:
self.vel(100, 0)
else:
self.vel(0, 0)
print("Wall found! Stopping..")
sys.exit()Wörtlich bedeutet der Code:
Wenn die vordere Distanz größer als die festgelegte self.safe_distance ist, dann soll der Roboter mit 100% der
maximalen Geschwindigkeit fahren. Wenn dies jedoch nicht zutrifft (was beim Unterschreiten der safe_distance erreicht
wird), dann fährt der Roboter mit 0% der maximalen Geschwindigkeit; d.h. er bleibt stehen. Anschließend wird noch ein
print-statement ausgeführt und das Programm wird mit sys.exit() beendet.
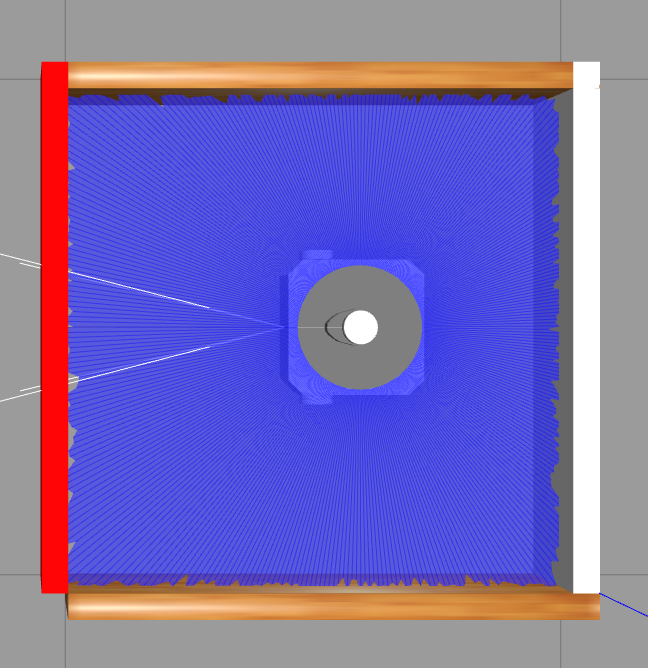
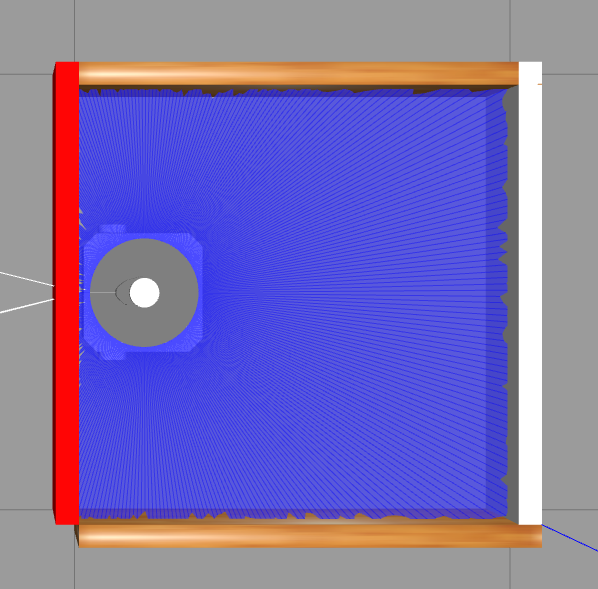
Hier eine Bilder-Kollage wie es abläuft:
Challenge 2:
Aufgabenstellung
Fahr zur roten Wand und bleib in einer sicheren Distanz stehen. Rotiere anschließend gegen den Uhrzeigersinn und fahr zur Holzwand und bleib stehen.
Lösung
Hierfür wurde das Skript aus Challenge 1 mitunter wiederverwendet. Als Lösung wurden nested if-else-Schleifen verbaut
und die globalen Variablen self.drive_allowed und self.turn_allowed eingeführt, welche zu Beginn als True
initialisiert wurden.
Das Prinzip bleibt wie bei Challenge 1: Es wird erst wieder solange beschleunigt, bis die self.safe_distance erreicht
wird. Dieses mal jedoch wurde die Distanz auf 0.4 statt auf 0.2 gesetzt. Grund ist: Bei einer sicheren Distanz
von 0.2 steht der Bot sehr nah an der Wand und bei einer darauf folgenden Drehung wird diese Wand mitgerissen. Bei einer
sicheren Distanz von 0.4 ist genug Abstand zur Wand, sodass diese nicht umgeworfen wird.
Ist der Bot nun unter der sicheren Distanz von 0.4, wird mit einer weiteren if-else-Schleife geprüft, ob die Intensität
vorne bei 2.0 liegt und self.turn_allowed auf True gesetzt ist. Die Intensität 2.0 entspricht der roten Wand. Kommt
das Skript in diesen Bereich, so wird die Geschwindigkeit des Bots erst auf 0 gesetzt, um stehen zu bleiben. Anschließend
wird mit einer Drehgeschwindigkeit von 85% der maximalen Drehgeschwindigkeit beschleunigt. Durch das nachfolgende
sleep(1) wird festgelegt, dass der Bot genau eine Sekunde drehen soll und anschließend wieder auf eine Geschwindigkeit
von 0% gesetzt wird und er somit stehen bleibt. Ist dies erfolgt, so wird self.turn_allowed auf False gesetzt, da
drehen nun nicht mehr erlaubt ist. Somit fährt der Bot durch den äußeren Part der if-else-Schleife wieder los.
Anschließend kommt man in den elif-Part der Schleife. Hier wird geprüft, ob die Intensität auch nicht wieder 2.0 ist.
Dann wird lediglich die Geschwindigkeit wieder auf 0% gesetzt und self.drive_allowed auf False gesetzt und das Skript
beendet.
Der relevante Code aus der scan_callback-Methode:
def __init__(self):
self.safe_distance = 0.4
self.drive_allowed = True
self.turn_allowed = True
def scan_callback(self, msg):
if self.drive_allowed:
if msg.ranges[0] > self.safe_distance:
self.vel(80, 0)
else:
if msg.intensities[0] == 2.0 and self.turn_allowed:
self.vel(0, 0)
print("Red wall found! \nTurning...")
self.vel(0, 85)
sleep(1)
self.vel(0, 0)
self.turn_allowed = False
pass
elif msg.intensities[0] != 2.0:
print("Wall found!")
print("Stopping..")
self.vel(0, 0)
self.drive_allowed = False
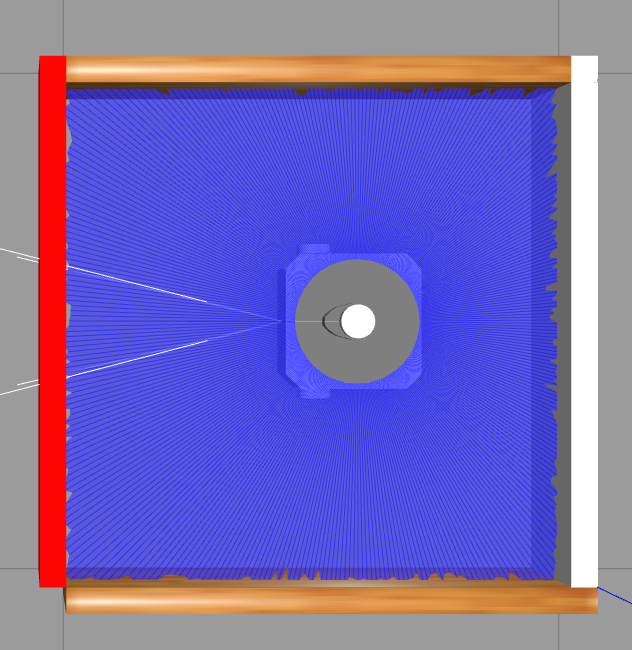
sys.exit()Hier nochmal dargestellt in Bildern:
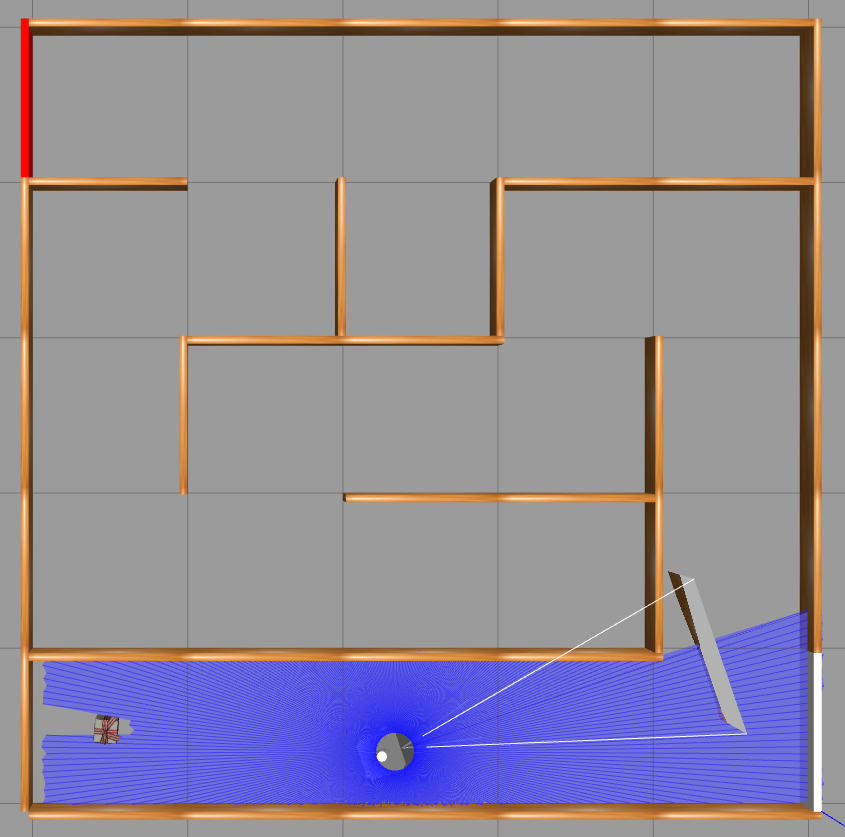
Challenge 4:
Aufgabenstellung
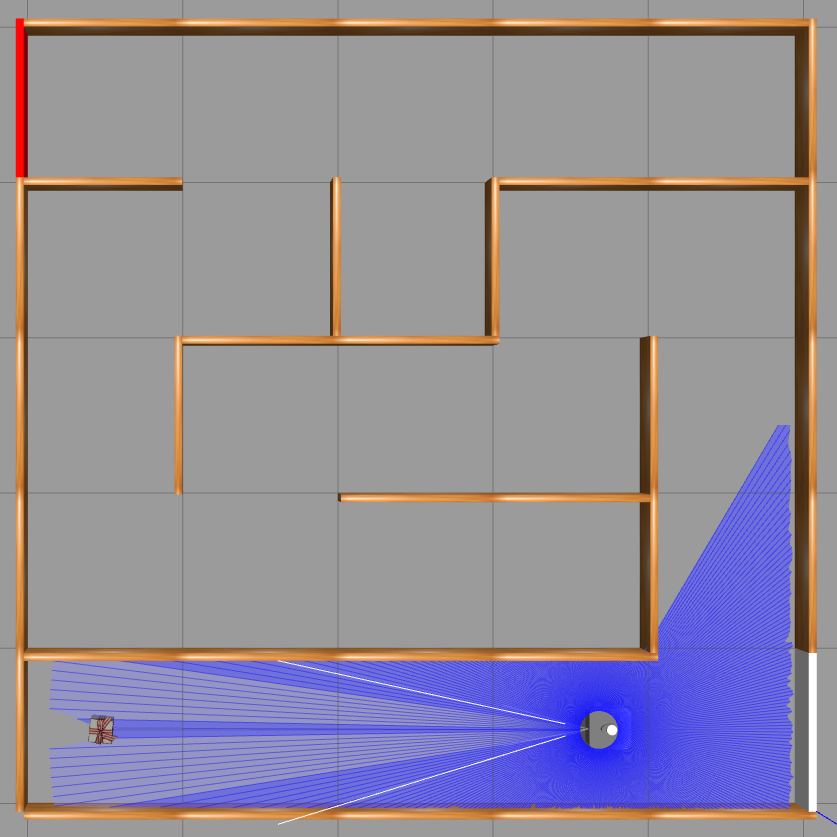
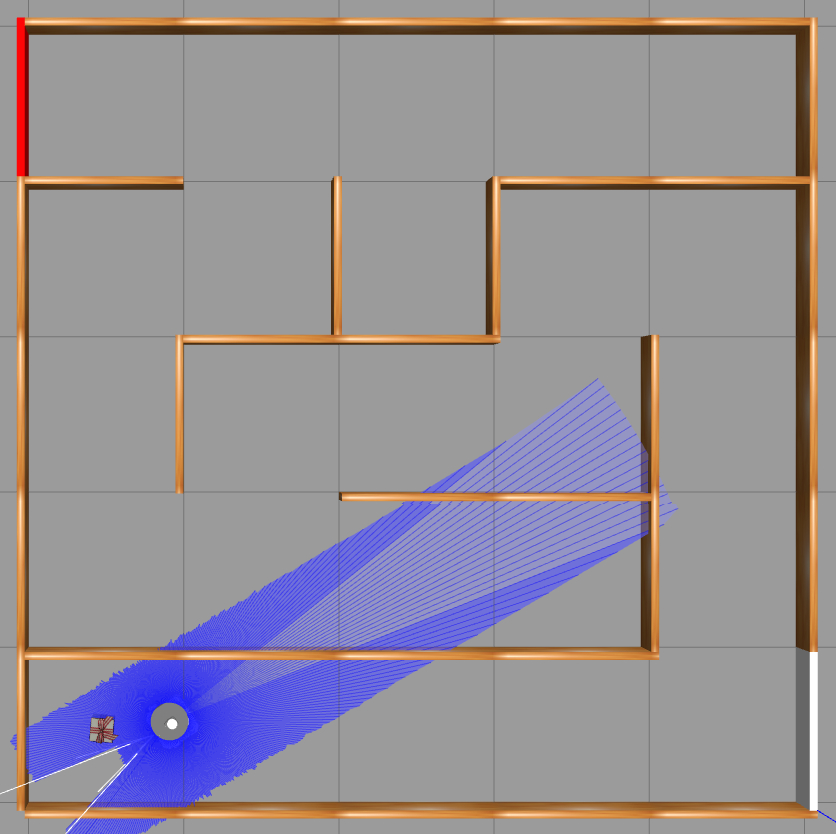
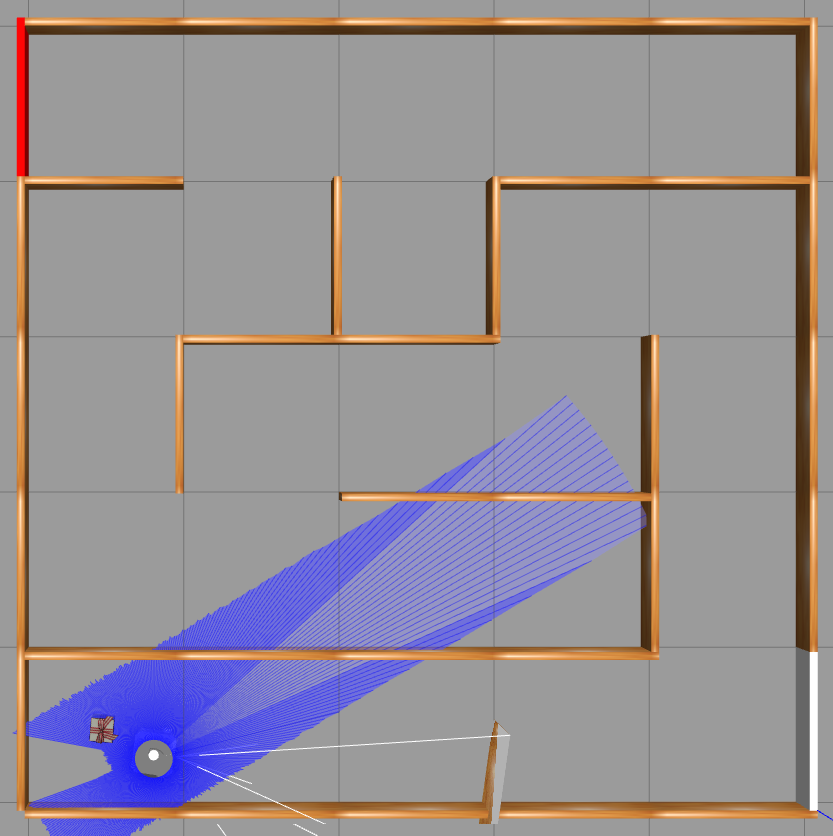
Weiche Gegenständen aus und fahre nicht an
Lösung
Die Herangehensweise an diese Challenge war etwas anders. Hierfür war meine Idee, den kompletten Bereich an Sensorwerten
vor dem Wafflebot abzugleichen. Das heißt: Im Prinzip werden alle Laserdaten von msg.ranges[-90] bis msg.ranges[90]
ausgelesen und ausgewertet.
Es wurde eine self.stop Variable eingeführt, die festlegt, ob der Bot nun fahren darf oder
stoppen soll. Diese ist standardmäßig mit False initialisiert. Auch die self.turn_allowed Variable lässt sich hier
wieder finden, die in diesem Fall aber von Anfang an mit False initialisiert wurde. Zuletzt gibt es noch die neue
Variable self.timestamp, welche später die aktuelle Zeit in Sekunden abspeichern soll.
Für diese Challenge wurde eine neue Methode namens drive() eingeführt, in der sich der hauptsächliche Code befindet.
Neben dieser Methode gibt es auch noch eine Methode mit dem Namen check_to_stop_turn(). Mehr dazu anschließend.
-
Zur
drive()-Methode:-
Zu Beginn wird geprüft, ob
self.turn_allowedauf False gesetzt ist, sodass der Roboter nicht drehen soll. Ist dies der Fall, so kommt man in die Schleife hinein. Dann wird in einer weiteren if-Schleife geprüft, ob die sichere Distanz zur Wand in den vorgenannten Richtungen unterschritten ist oder nicht. Hierfür existiert eine Liste namensfront_area, in der die Distanzwerte zwischenmsg.ranges[-90]undmsg.ranges[90]gespeichert sind.
Ist die sichere Distanz in einem der Bereiche unterschritten, so wird geprüft, ob dort eine rote Wand (also das Ziel) ist. Falls ja, so ist der Bot angekommen, bleibt stehen und die Variableself.stopwird auf False gesetzt. Wenn nicht, wirdself.turn_allowedauf True gesetzt und der Roboter hat damit prinzipiell die "Erlaubnis", zu drehen. -
Damit kommt man in die nächste if-Schleife, in der es um das Drehen des Roboters geht. Hier wird zu Beginn geprüft, ob die Distanz links kleiner als rechts ist. Ist dies der Fall, so dreht sich der Roboter nach rechts und es wird kontinuierlich mit
check_to_stop_turn(), ob der Roboter noch weiter drehen darf. Darf er das nicht mehr, also gibt die Methode True aus, so wird der Roboter gestopt undself.turn_allowedwird auf False gesetzt.
Ist links die Distanz jedoch größer als rechts, so dreht sich der Roboter nach links und es wird, wie gerade erklärt, wieder geprüft, ob der Roboter den Dreh stoppen soll oder nicht.
-
-
Zur
check_to_stop_turn()-Methode:
Anfangs wird der Bereich, der zu prüfen ist, festgelegt und wieder in einer Liste namensfront_areaabgespeichert. Dann dreht sich der Wafflebot solange, bis die vordere Distanz größer als 1.0, die Distanz links und rechts jeweils größer als 2.0 und jede einzelne andere Distanz größer als die sichere Distanz ist. Erst dann wird True zurückgegeben und der Roboter soll somit das Drehen beenden. Ansonsten wird immer False zurückgegeben und der Bot dreht sich solange weiter.
Die beiden neuen Methoden als Code:
def __init__(self):
self.safe_distance = 0.4
self.turn_allowed = False
self.stop = False
self.timestamp = 0
def drive(self, msg):
front = msg.ranges[0]
left = msg.ranges[90]
right = msg.ranges[-90]
rear = msg.ranges[180]
left_area = msg.ranges[330:360]
right_area = msg.ranges[0:30]
front_area = left_area + right_area
if not self.stop:
if not self.turn_allowed:
for distance in front_area:
if distance > self.safe_distance or distance == 0.0:
self.vel(60, 0)
else:
# stop at red color
if msg.intensities[0] == 2.0:
self.vel(0, 0)
self.stop = False
else:
self.turn_allowed = True
self.timestamp = time()
if self.turn_allowed:
if left < right:
print("Turning right!")
self.vel(0, -50)
sleep(0.25)
if self.check_to_stop_turn(msg):
sleep(0.1)
self.vel(0, 0)
self.turn_allowed = False
else:
print("Turning left!")
self.vel(0, 50)
sleep(0.25)
if self.check_to_stop_turn(msg):
sleep(0.1)
self.vel(0, 0)
self.turn_allowed = False
def check_to_stop_turn(self, msg):
left_area = msg.ranges[330:360]
right_area = msg.ranges[0:30]
front_area = left_area + right_area
for distance in front_area:
if msg.ranges[0] > 1.0 and msg.ranges[90] > 0.2 and msg.ranges[-90] > 0.2 and distance > self.safe_distance:
print("Turn stopped!")
return True
else:
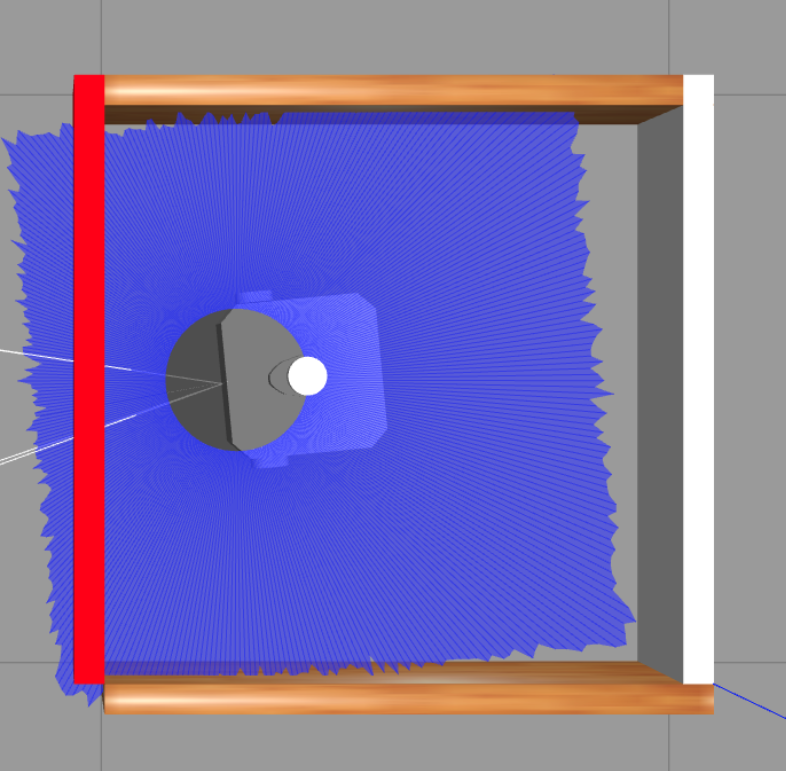
return FalseDer Ablauf in Bildern:
Blockquotes
Kermit from the Muppet Movie:
Life's like a movie. Write your own ending.
Lists
- apple
- banana
- cherry
Links
More info can be found on Python docs – Exceptions.
Images

Code snippets
We can use find -iname STRING to search for a file in Unix.
The following code1 shuffles a list:
from random import shuffle
foo = [1, 2, 3, 4]
shuffle(foo)
print(foo)The end
If you want to try these, follow this Markdown tutorial. It also includes a web-based code editor.
-
Code from PythonSnippets.dev ↩